1- مقدمه
واحد اندازه گیری اینرسی ( IMU ) یکی از حسگرهای رایج برای ارائه دادههای حرکتی در قالب زمانی است. از فعالیتهای سادهی انسانی مثلا گام شمارها تا ردیابی و ناوبری سیستمهای پیچیده کنترلی بدون سرنشین زمینی و هوایی و بسیاری موارد دیگر استفاده میشوند. در عصر هوش مصنوعی، این حسگر ارزان و قابل اعتماد میتواند دادههای مورد نیاز کاربر را تامین کند.
2- سنسور چیست؟
سنسور وسیلهای است که اطلاعات محیط اطراف را اندازهگیری میکند و سیگنال خروجی الکتریکی را در پاسخ به پارامتر اندازهگیری شده ارائه میدهد. در طول سالها، این اطلاعات (یا پدیده) از نظر نوع حوزههای انرژی دستهبندی شدهاند، این حوزههای انرژی عبارتند از:
- مکانیکی: نیرو، فشار، سرعت، شتاب، موقعیت
- حرارتی: دما، آنتروپی، گرما، جریان گرما
- شیمیایی: غلظت، ترکیب، سرعت واکنش
- تابشی: شدت موج الکترومغناطیسی، فاز، طول موج، بازتاب قطبش، ضریب شکست، انتقال
- مغناطیسی: شدت میدان، چگالی شار، گشتاور مغناطیسی، نفوذپذیری
- الکتریکی: ولتاژ، جریان، شارژ، مقاومت، ظرفیت، قطبش
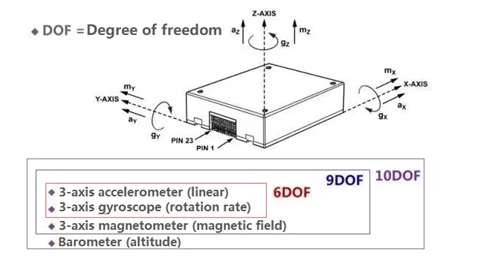
۳- IMU چیست؟
واحد اندازه گیری اینرسی یکی از حسگرهای رایج در زمینه ناوبری است. این سنسور در اکثر مواقع شامل یک شتاب سنج و ژیروسکوپ است. در حالتهای دیگر شامل یک سنسور 6 درجه آزادی وگاهی اوقات شامل یک مغناطیس سنج (3 درجه آزادی) و یک فشارسنج یا دماسنج (1 درجه آزادی) خواهد بود.
4- این سنسور چگونه کار میکند؟
برای توضیح نحوه عملکرد واحد اندازه گیری اینرسی (IMU) باید به عملکرد بخشهای مختلف سنسور به صورت جداگانه پرداخته شود.
1-4- عملکرد شتاب سنج
شتاب سنج سنسوری است که نیروی خاص را اندازه گیری میکند و شتاب)حتی شتابهای ناشی از ارتعاشات یا مانورها(را در محورهای x، y و z در درون یک قاب مرجع (دارای هیچ گونه شتابی نیست) اندازهگیری میکند. سنسور، شتاب را به یک ولتاژ تبدیل میکند و پس از تبدیل به عددی باینری توسط خلبانخودکار درک خواهد شد.
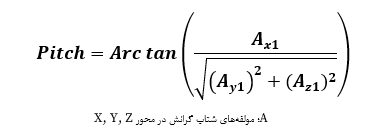
حائز اهمیت است هنگامی که یک شتاب سنج به عنوان شیب سنج استفاده میشود، مولفههای بردار گرانش در حالت سکون اندازهگیری میشوند تا زاویه شیب به صورت زیر ارزیابی شود:
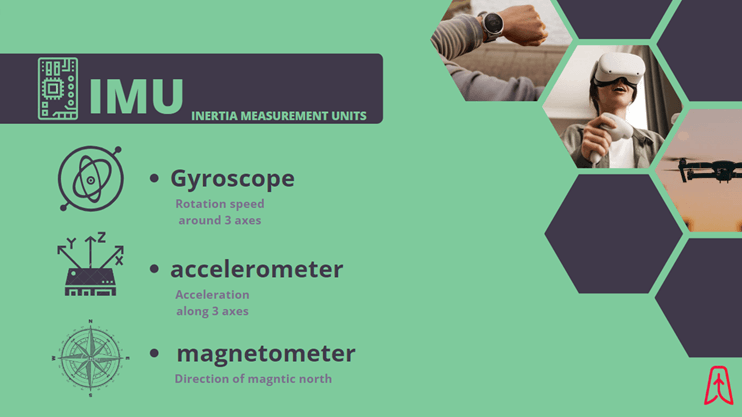
2-4- عملکرد ژیرسکوپ
در حالی که شتاب سنجها میتوانند شتاب خطی را اندازه گیری کنند، نمیتوانند چرخش یا حرکت چرخشی را بسنجد. با این حال ژیروسکوپها سرعت زاویهای را در راستای سه محور، نسبت به قاب فلزی ( دیسک دوار درون قاب فلزی نصب میشود تا هیچگونه گشتاور خارجی به آن وارد نشود) اندازهگیری میکنند: پیچ(محور x)، رول(محور y) و انحراف(محور z).
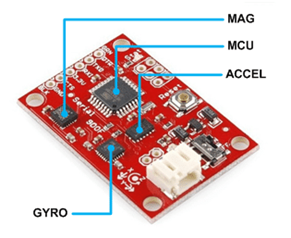
شکل 4-1 برد IMU
GYRO(Gyroscope): ژایرسکوپ
ACCL(Accelerometer): شتاب سنج
MAG (Magnetometer): مغناطیس سنج
MCU (Multipoint Control Unit): ریز پردازنده
3-4- عملکرد مغناطیس سنج
مغناطیس سنج سنسوری است که قدرت وجهت میدان مغناطیسی زمین را اندازهگیری میکند. (قطب نما یکی از این وسایل است.)
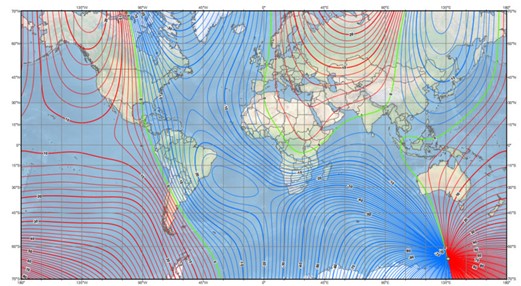
شکل 4-2 نقشه میدان مغناطیسی جهانی
4-4- فشارسنج
سنسوری است که فشار هوا را اندازهگیری میکند و میتواند میزان ارتفاع را محاسبه کند.
هر یک از مشخصهها در یک سیستم مختصات سه محوری نشان داده شده است، همین طور با انجام محاسبات ریاضی میتوان سرعت، موقعیت و نیروی خالص وارده به جسم متحرک را در زمان برآورد کرد.
۵- IMUهای مبتنی بر فناوری MEMS
شاید در ابتدا مسئله به وجود آمده برای مخاطب این باشد که MEMS چیست؟!
سیستمهای میکرو الکترومکانیکی یا MEMS، فناوری میکرو سیستم است که در کلیترین شکل آن را میتوان به عنوان عناصر مکانیکی و الکترومکانیکی مینیاتوری (یعنی دستگاهها و سازهها) تعریف کرد که با استفاده از تکنیکهای میکروساخت ساخته میشوند. ابعاد فیزیکی دستگاههای MEMS میتواند از بسیار کمتر از یک میکرون تا چندین میلیمتر متغیر باشد.
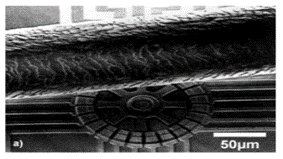
شکل ۵-۱ یک موتور سیلیکونی MEMS همراه با تار موی انسان
۱-۵- فناوری ژیرسکوپ MEMS
ژیروسکوپهای MEMS دستگاههای غیر چرخشی هستند و از اثر شتاب کوریولیس ( لینک خارجی) بر روی جرمهای مقاوم در برابر ارتعاش برای تشخیص چرخش زاویهای اینرسی استفاده میکنند. بنابراین این حسگرها متکی به تشخیص نیروی وارد بر جرمی هستند، که در معرض حرکت ارتعاشی خطی، میچرخد.
۲-۵- فناوری شتاب سنج MEMS
دستگاههای MEMS ممکن است به دو دسته مجزا تقسیم شوند، که نشاندهندهی روشی است که در آن شتاب اعمال شده در دستگاه، حس میشود:
-
- جابجایی یک جسم صلب در حضور یک شتاب اعمال شده
-
- تغییر در فرکانس یک عنصر ارتعاشی ناشی از بارگذاری مکانیکی که هنگام قرار گرفتن در معرض شتاب رخ می دهد.
۳-۵- فناوری مغناطیس سنج MEMS
اکثر مغناطیس سنجهای MEMS برای اندازهگیری میدان مغناطیسی اطراف به مقاومت مغناطیسی تکیه میکنند. مغناطیس سنجهای مقاومت مغناطیسی به دلیل تغییر در میدانهای مغناطیسی، مقاومت را تغییر میدهند. به طور معمول، مغناطیس سنجهای MEMS برای اندازهگیری یک میدان مغناطیسی محلی که ترکیبی از میدان مغناطیسی زمین و همچنین هر میدان مغناطیسی ایجاد شده توسط اجسام مجاور تشکیل شده است، استفاده میکنند.
۶- IMUها چه کاربردهایی دارند؟
فناوری MEMS بسیار متنوع و قابل توسعه است. در حال حاضر، MEMS با امکان تحقق کامل سیستمها روی یک تراشه با هزینه نسبتاً کم، بسیاری از دستههای محصولات را متحول کرده است. کاربردهایی از جمله دوربینهای دیجیتال، گوشیهای هوشمند، کنترلهای بازیهای رایانهای، و کاربردهای خودرو نظیر سیستم کیسه هوا و سیستمهای الکترونیکی کنترل پایداری ارائه میدهند. در زمینه پلتفرمهای خودکار که از GPS و سنسور بهره گرفته و نیازمند ابعاد کوچک هستند، MEMSها برای ماموریتهای کوتاه مدت تعادل، کنترل و ناوبری استفاده میشوند. تقریباً در همه جا میتوانید این سنسورها را بیابید. برای مثال یک نرمافزار شیب سنج را روی تلفن همراه خود نصب کنید، میتوانید به راحتی قاب عکس روی دیوار اتاق خود را در دقیقترین حالت ممکن نصب کنید.

شکل 6-1 نوعی شیب سنج
هدستهای واقعیت مجازی [A31] عمدتاً از این حسگرهای IMU برای پیگیری موقعیتی که سر شما در آن قرار دارد برای تغییر نمایش محتوای ویدیویی که ارائه میکند، استفاده میکنند. به عنوان مثال؛ وقتی به بالا نگاه میکنید اساساً سر خود را حول محور X میچرخانید، و این توسط ژیروسکوپ حسگر IMU که در داخل هدست واقعیت مجازی شما قرار داده شده است، احساس میشود و به نوبه خود، یک نمای ویدیویی دیگر به شما میدهد.

شکل ۶-۲ نوعی هدست
۷- خرید IMU
از شرکتهای معتبر ارائه دهنده اینگونه سنسورها میتوان به شرکتهای TDK Intenseness، ACEINNA، Analog Devices، STMicroelectronics، MEMSIC، SBG systems، Murata Electronics و silicon sensing اشاره کرد.

شکل ۷-۱ IMUهای مهروموم شده شرکت SBG Systems
قیمت IMUهای موجود در بازار برای استفاده در ناوبری و هدایت از جمله پهپادها از رنج قیمت زیر 10 دلار تا سنسورهای 9 درجه آزادی 5هزار دلاری موجود هستند.
پیشنهاد ما این است قبل از خرید با توجه به نیاز خود دیتاشیتهای هر محصول را ارزیابی و سپس اقدام به تهیه محصول کنید البته برای این کار میتوانید از کارشناسان شرکت ما کمک بگیرید. (با ما تماس بگیرید: 91029166-021)